店铺已到期,升级享全网推广!
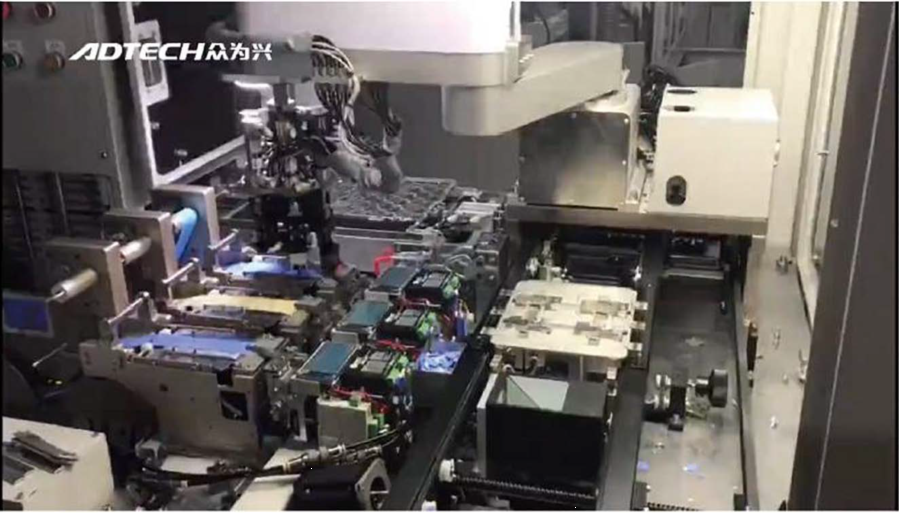
项目概况:AR6520机器人搭配AVS双视觉系统进行飞拍装配。
工艺流程:机器人进行固定位置多工具取料,机器人运行至倒装相机上方Z轴高速旋转飞拍纠偏,J2轴相机识别安装位置后进行装配。
应用精度:土0.04mm。
运行节拍:6-10S/套
设备优势:整线效率节拍提高3.5%
节省工位人员3人,1年回收成本,设备使用年限3年以上。 整机设备精度高,设备可靠性高,产品良率提升2%。